| Utilizar un plano de referencia
|
Un plano de referencia (o cara plana) define dos direcciones en su plano y una tercera dirección que es normal al plano. Las dos direcciones del plano se conocen como Plano dir. 1 y Plano dir. 2. Son paralelas a los contornos del plano y el programa las asigna internamente. Estas direcciones no se pueden modificar. Al aplicar restricciones y cargas, seleccione Vista preliminar para identificar el Plano dir. 1 y el Plano dir. 2. Las flechas de los símbolos de carga o de restricción apuntan al Plano dir. 1 positivo, el Plano dir. 2 y la normal a las direcciones de plano.
Puede identificar la dirección normal por la regla de la mano derecha: el dedo pulgar apunta al plano Dir. 1 positivo, el dedo índice apunta al plano Dir. 2 positivo y el dedo corazón apunta a la dirección normal.
Para las direcciones de propiedad de material, Dir. 1 se alinea con la dirección X, Dir. 2 con la dirección Y y la normal al plano con la dirección Z.
|
| Uso de los planos Frontal, Derecho y Superior como la geometría de referencia. |
La tabla muestra la orientación de dirección con respecto al sistema de coordenadas global, al seleccionar uno de los planos Frontal, Derecha o Superior como geometría de referencia.
| Alzado |
Dir. 1 se alinea con la dirección X global. Dir. 2 se alinea con la dirección Y global.
Normal al plano se alinea con la dirección Z global.
|
| Vista lateral |
Dir. 1 se alinea con la dirección Z global. Dir. 2 se alinea con la dirección Y global.
Normal al plano se alinea con la dirección X global.
|
| Planta |
Dir. 1 se alinea con la dirección X global. Dir. 2 se alinea con la dirección Z global.
Normal al plano se alinea con la dirección Y global.
|
|
| Sistemas de coordenadas
|
Un sistema de coordenadas define 3 direcciones, X, Y y Z. El sistema de coordenadas predeterminado que utiliza el software, llamado sistema de coordenadas global, se basa en el Plano 1 (plano Frontal). El origen del sistema de coordenadas global se encuentra dentro del origen de la pieza o del ensamblaje. El Plano 1 es el plano de referencia principal que aparece en el gestor de diseño del FeatureManager. El sistema de referencia muestra las direcciones globales X, Y y Z. A todos los otros sistemas de coordenadas se los denomina sistemas de coordenadas locales. Puede definir un sistema de coordenadas local con .
|
| Utilizar un eje de referencia |
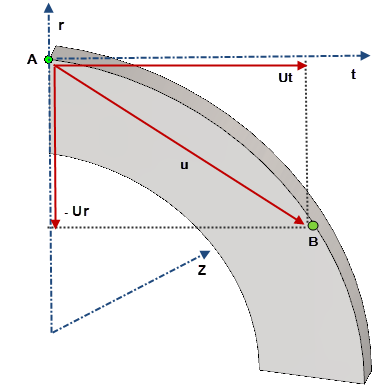
Un eje de referencia define una dirección radial, una dirección circunferencial y una dirección axial. Al aplicar restricciones y cargas, seleccione la casilla de verificación Vista preliminar en el PropertyManager para identificar las direcciones positivas. Utilice valores negativos para la dirección opuesta.Al especificar una traslación circunferencial, se especifica un ángulo (Θ) en radianes. Esto establece la traslación en la dirección circunferencial (v) en: v = r.Θ, donde r es el radio del nodo en el cual se aplica la restricción en relación con el eje de referencia. Al ver los resultados de deformación con respecto a un eje de referencia, los vectores de desplazamiento se muestran como Ur, Ut y UZ, donde r representa la dirección radial, t la dirección tangencial y z la dirección axial. Este sistema r- t -z se produce con respecto a la configuración original de cada nodo.
Si tomamos un cuarto de anillo como ejemplo, supongamos que un nodo A se desplaza de su posición original hasta el punto B y que el vector de desplazamiento al final de una solución no lineal se define mediante u. El programa muestra para el desplazamiento radial Ur un valor negativo en la dirección radial original del nodo A y para la dirección tangencial un valor positivo Ut en la dirección tangencial original del nodo A. Tenga en cuenta que Ur no indica necesariamente una expansión (o contracción) del anillo y Ut no indica tampoco una rotación del anillo.
 |
| Utilizar una cara cilíndrica |
Esto es similar a la utilización de un eje de referencia. El eje de la cara cilíndrica se utiliza como el eje de referencia. |
| Utilizar una arista recta
|
Una arista recta define una dirección. Al aplicar restricciones y cargas, seleccione la casilla de verificación Vista preliminar en el PropertyManager para identificar la dirección positiva. |