远程载荷/质量 PropertyManager 允许您将远程载荷、远程质量和远程平移应用于静态、非线性静态和拓扑算例。
对于频率、线性动态、扭曲和非线性动态算例,请参阅主题“远程载荷/质量 PropertyManager(适用于频率、线性动态、扭曲和非线性动态算例)”。
您无法在线性动力学响应波谱算例中应用远程载荷或远程质量。
要访问远程载荷/质量 PropertyManager:
- 在 Simulation 算例树中,用右键单击外部载荷文件夹,然后选取远程载荷/质量。
- 单击 。
- 单击 远程载荷/质量
 (应用载荷工具栏)。
(应用载荷工具栏)。
选择
| 面 |
选择要应用远程载荷、远程质量或远程平移及旋转的面。 |
参考坐标系
定义用于解析远程特征位置和方向的坐标系。
| 全局 |
默认使用的是整体坐标系。 整体坐标系基于前视基准面,其原点是零件或装配体的原点。 |
|
用户定义
|
单击选择坐标系  ,然后从弹出式 FeatureManager 树中选择一个坐标系。 如果未选择任何坐标系,将默认使用整体坐标系(前视基准面)。 此坐标系将被用来解析远程特征的位置和方向。 ,然后从弹出式 FeatureManager 树中选择一个坐标系。 如果未选择任何坐标系,将默认使用整体坐标系(前视基准面)。 此坐标系将被用来解析远程特征的位置和方向。 |
位置
定义参考节点位置的坐标。

|
单位
|
定义远程节点坐标的单位。 |
| 
|
X-位置
|
相对于所选的坐标系(或整体坐标系),应用远程载荷、质量或平移的点的 X 坐标。 |
| 
|
Y-位置
|
相对于所选的坐标系(或整体坐标系),应用远程载荷、质量或平移的点的 Y 坐标。 |
| 
|
Z-位置
|
相对于所选的坐标系(或整体坐标系),应用远程载荷、质量或平移的点的 Z 坐标。 |
平移零部件
定义远程力和远程平移。
|
单位 |
定义远程载荷和远程平移的单位。 |
|
|
X-方向 |
定义 X 方向上的远程力或远程平移的值。 |
|
|
Y-方向 |
定义 Y 方向上的远程力或远程平移的值。 |
|
|
Z-方向 |
定义 Z 方向上的远程力或远程平移的值。 |
旋转零部件
定义远程力矩和远程旋转。
|
单位 |
定义远程力矩和远程旋转的单位。 |
|
|
X-方向 |
定义 X 方向上的远程力矩或远程旋转的值。 |
|
|
Y-方向 |
定义 Y 方向上的远程力矩或远程旋转的值。 |
|
|
Z-方向 |
定义 Z 方向上的远程力矩或远程旋转的值。 |
连接类型
分布式耦合将耦合节点的运动约束为应用远程特征的参考节点的平移和旋转。
将以平均方式实施分布式耦合约束,以能够通过耦合节点处的权重因子控制远程载荷和位移的传输。 分布式耦合允许选定几何体的耦合节点相对于彼此移动。
| 分布 |
对于具有多个耦合节点的情况,远程力/力矩和质量的分布并不仅仅由平衡来确定,并且分布权重因子也会缩放分布。
|
权重因子: 默认(常量)
|
统一权重分布。 所有权重因子 wi 等于 1。
|
|
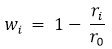
线性
|
权重因子随与参考节点之间的距离线性减小。
|
|
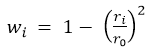
二次
|
权重因子随与参考节点之间的距离按二次多项式公式减小。
|
|
三次
|
权重因子随与参考节点之间的距离按三次多项式公式减小。
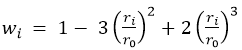
wi 是耦合节点 i 处的权重因子,ri 是耦合节点与参考节点的径向距离,r0 是到最远耦合节点的距离。
|
|
| 刚性 |
耦合节点不会相对于彼此移动。 刚性杆将参考点连接到耦合节点,且可能产生高应力结果。 应用有远程载荷或位移的面的行为方式与刚性实体相似。 |
质量
定义远程质量的零部件。
|
单位 |
定义远程质量零部件的单位。 |
| 
|
远程质量
|
定义远程质量值。 |
| 
|
惯性动量
|
定义相对于 X 轴的质量惯性动量。 |
| 
|
惯性动量
|
定义相对于 Y 轴的质量惯性动量。 |
| 
|
惯性动量
|
定义相对于 Z 轴的质量惯性动量。 |
| 
|
惯性动量
|
定义相对于 X 和 Y 轴的惯性项积。 |
| 
|
惯性动量
|
定义相对于 Y 和 Z 轴的惯性项积。 |
| 
|
惯性动量
|
定义相对于 X 和 Z 轴的惯性项积。 |
惯性质量力矩相对于在 CG 处置中且 X-Y-Z 轴平行于整体坐标系的坐标系或者用户定义的坐标系计算得出。
随时间变化
对于非线性算例,您可以定义时间相关远程载荷。
带频率的变量
对于谐波和无规则振动算例,您可定义频率相关。
符号设置
| |
编辑颜色
|
修改远程载荷符号的颜色。 |

|
符号大小
|
使用数值输入方框箭头来增大或减小远程载荷符号的大小。
|
| |
显示预览
|
打开/关闭远程载荷符号的显示。
|