 |
Rotation Reference |
Select an edge or a vertex in the
graphics area to define the rotation axis. |
 , ,  , ,  |
X
Rotation Origin, Y
Rotation Origin, Z
Rotation Origin |
Set values for the coordinates of the rotation origin
(the point that the bodies rotate about). The default values are the
coordinates of the center of
the
bounding box of the selected bodies. |
 , ,  , ,  |
X
Rotation Angle, Y
Rotation Angle, Z
Rotation Angle |
Set values for the angle around
the X, Y, and Z axes. |
 |
Angle |
Available when you select an edge
for Rotation Reference
.
Sets the value for the rotation angle. |
| |
Euler's angular rotation (Turns off the , , and
Rotation Angle
fields) |
Delivers the same resulting
rotation regardless of the order in which you specify the Yaw, Pitch, and Roll values. |
 , ,  , ,  |
Reverse Direction Yaw, Reverse Direction Pitch, Reverse Direction Roll (Unavailable
if you use equations or variables for the values) |
Reverses the direction of the
specified Euler angular values. |
| |
Yaw
(side-to-side), Pitch
(up-down), Roll
(twist)
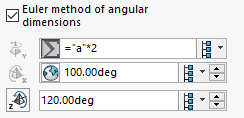
|
Specifies the Euler angular values in
degrees.
You can control the values with equations or
variables that you create in the Equations, Global Variables, and Dimensions
dialog box. To access equations or variables, enter = and from the menu, select
Global Variables,
Functions, or
File Properties.
Enter and accept  the equation or variable. the equation or variable.
You can click Toggle
Equation/Value Display
 or
Toggle Global Variable/Value
Display or
Toggle Global Variable/Value
Display
 to display
the equation, variable, or value. to display
the equation, variable, or value.
You can also add the equations to a design table
and control them there.
|
 , ,  , ,  |
This
Configuration, All
Configurations, Specify
Configurations |
Specifies that the values apply
to configurations. |