非拘束のボディ(Underconstrained Bodies)ツールを使用して、拘束、コネクタ、またはボンド相互作用条件によって適切に支えられていないボディの剛体(フリー ボディ)モードを検出できます。
非拘束ボディを検出するには、次のいずれかを実行します:
- 静解析スタディ ツリーで、接合部(Connections)
 を右クリックし、非拘束のボディ(Underconstrained Bodies)
を右クリックし、非拘束のボディ(Underconstrained Bodies) をクリックします。
をクリックします。
- CommandManager で 診断ツール(Diagnostic Tools)を選択し、非拘束のボディ(Underconstrained Bodies)をクリックします。
- ダイアログ ボックスで、非拘束ボディを自動的に検知(Automatically detect underconstrained bodies)を選択します。
最善の方法として、非拘束のボディ(Underconstrained Bodies)ツールを実行する前に、モデルに対して現実的な材料、荷重、境界条件を定義してください。スタディ プロパティは、ユーザーが解析しようとしているモデルの常時荷重と境界条件をできるだけ正確に反映する必要があります。
アセンブリの各部品に対して、このアルゴリズムはグローバル X、Y、Z 方向、さらに斜め方向でも自由移動と回転を確認します。部品間にチェーン(またはヒンジ)メカニズムを持つアセンブリで不安定性の問題を検出することも可能です。フリー ボディ モードが検出された場合は、非拘束のボディ(Underconstrained Bodies)ツールは、それに応じてそれらをアニメーション化します。
非拘束のボディの検出は、有限要素モデルに関連付けられた剛性マトリックスから縮小サイズの剛性マトリックスへの変換に基づきます(一般的には、ボディごとに 3 つの並進自由度と 3 つの回転自由度を持ちます)。低減されたシステムの非拘束モードは、元のシステムの関係式と同等です。
グローバル剛性マトリックスの低減剛性マトリックスへの変換は、次の方法で完了します。
- 各ボディの並進および回転動作を表す 6 つの自由度を持つ、単一の代表的節点(基準点)を各ボディに導入する
- 元の自由度を代表的節点の自由度に置き換えることによって、要素剛性マトリックスを変換する
- 変換された要素剛性マトリックスをアセンブルして、低減剛性マトリックスを決定する
利点
このソリューションははるかに高速です。パフォーマンスの向上は、低減剛性マトリックスに対して実行される特異値分解(SVD)手法の採用に基づいています。低減剛性マトリックスは、境界条件、ボンドおよび接触の相互作用、またはコネクタから生じた、ボディ間のインターフェース サーフェス相互作用から計算されます。
以下は、低減剛性マトリックスの例です。
|
|
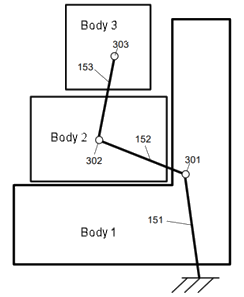 |
| 各ボディは剛性マトリックスの 1 つの参照点まで低減します。グローバル剛性マトリックスは、数十万の自由度からわずか 18(3 つのボディ x 6 つの自由度)まで低減されます。 |
この手法では、ボディ間の相互作用から生じる剛性が考慮されます。ボディ 1 とボディ 2 が接触するので、この方法では参照点間の剛性の影響が考慮されます。この方法では、例えばボディ 1 と地面の間の剛性など、境界条件から発生する剛性も考慮されます。 |
SVD 手法は、低減剛性マトリックスを 3 つのマトリックスに分解します。
U ベクトルと V ベクトルは互いに直交し、変位フィールドの形状を表します。中央のマトリックスは対角行列です。対角項は、ボディ間、またはボディと地面間のリンクの相対的な剛性を表します。対角項のいずれかがゼロまたはゼロに近い場合、これは剛体モードを示しています。
アセンブリ全体の非拘束変位のアニメーションを表示できます。
斜め方向で並進または回転をアニメーション表示できます。