您可使用未充分限制的本體工具偵測沒有獲得固定物、連接器,或結合互動條件充分支援的本體之任何剛性 (或自由) 本體模式。
若要偵測未充分限制的本體,請執行以下其中一項:
- 在靜態研究樹狀結構中,以滑鼠右鍵按一下連接
 ,然後按一下未充分限制的本體
,然後按一下未充分限制的本體  。
。
- 從 CommandManager 選擇診斷工具,然後按一下未充分限制的本體 。
- 從對話方塊中,選擇自動偵測未充分限制的本體。
最佳做法是在執行未充分限制的本體工具前,為模型定義真實的材料、負載和邊界條件。研究屬性應儘可能精確反映您嘗試要分析的模型之操作負載及邊界設定。
演算法會針對組合件模型的每一零件,檢查整體 X、Y 和 Z 方向以及傾斜方向是否存在自由平移及旋轉。它也能偵測在零件之間具有鏈條 (或鉸鏈) 機制的組合件內的不穩定問題。若偵測到自由本體模式,身未充分限制的本體工具會為其產生動畫。
未充分限制的本體偵測以將與有限元素模型相關的勁度矩陣轉換成尺寸較小的勁度矩陣 (通常每個本體會有三個平移和三個旋轉自由度) 為基礎。較小系統的未充分限制模式與數學關係式原始系統同等。
將整體勁度矩陣轉換為尺寸較低勁度矩陣的方式如下:
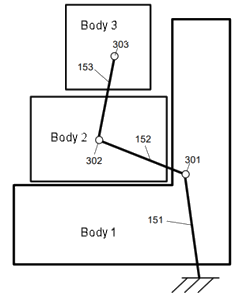
- 為每個本體引入一個代表節點 (參考點) 及六個自由度,以代表每個本體的平移和旋轉動作
- 以代表節點的自由度取代原始自由度,進而轉換元素勁度矩陣
- 組合轉換後的元素勁度矩陣,以決定尺寸較小的勁度矩陣
優點
求解速度更快。達到效能改進的基礎是採用在較低勁度矩陣上執行的奇異值分解 (SVD) 技術。較低勁度則是由本體間來自邊界條件、結合和接觸互動或連接器的介面曲面互動計算而得。
以下是較低勁度矩陣的範例:
|
|
 |
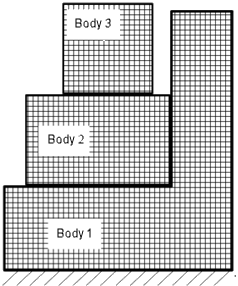
| 每個本體會減少至勁度矩陣中只有一個參考點。整體勁度矩陣則從數十萬個自由度縮減到僅 18 個 (3 個本體 x 6 個自由度)。 |
方法會考量來自本體間互動的勁度。本體 1 和 2 會互相接觸,因此方法會考量兩者在參考點間的勁度影響。此方法也會考慮來自邊界條件的勁度,例如本體 1 和地面間的勁度。 |
SVD 技術會將較低勁度矩陣分解成三個矩陣。
U 及 V 向量彼此正交,可表示位移場的形狀。中間矩陣為對角矩陣。對角項代表本體間或本體與地面間連結的相對勁度。若任何對角項為零或接近零,則表示為剛性本體模式。
您可檢視整個組合件未受限制位移的動畫。
您可檢視傾斜方向的平移或旋轉動畫。