È possibile usare l'o strumento Corpi sotto vincolo per rilevare qualsiasi modo del corpo rigido (o libero) non adeguatamente supportato da fissaggi, connettori o condizioni di interazione vincolate.
Per individuare i corpi sotto vincolo, eseguire una delle seguenti operazioni:
- Da un albero di studio statico, fare clic con il pulsante destro del mouse su Connessioni
 e fare clic su Corpi sotto vincolo
e fare clic su Corpi sotto vincolo  .
.
- Dal CommandManager, selezionare Strumenti di diagnostica, quindi fare clic su Corpi sotto vincolo .
- Dalla finestra di dialogo , selezionare Rileva automaticamente corpi sotto vincolo.
Come best practice, prima di eseguire lo strumento Corpi sotto vincolo, definire materiali, carichi e condizioni di delimitazione realistici per il modello. Le proprietà dello studio dovrebbero riflettere nel modo più preciso possibile i carichi operativi e le condizioni al contorno del modello che si tenta di analizzare.
Per ogni parte di un assieme, l'algoritmo controlla la presenza di traslazioni e rotazioni libere nella direzione X, Y e Z globale e anche nelle direzioni oblique. È anche in grado di rilevare problemi di instabilità negli assiemi con meccanismi a catena (o cardine) tra le parti. Nei casi in cui vengano rilevate modalità corpo libero, lo strumento Corpi sotto vincolo le anima di conseguenza.
Il metodo di rilevamento dei corpi sotto vincolo si basa sulla trasformazione della matrice di rigidità associata a un modello di elemento finito in una matrice di rigidità di dimensioni ridotte (in genere con tre gradi di libertà traslazionale e tre gradi di rotazione per corpo). Le modalità sotto vincolo del sistema ridotto sono equivalenti al sistema originale di equazioni.
La trasformazione della matrice di rigidità globale in una matrice di rigidità di dimensioni ridotte viene completata da:
- Introduzione di un singolo nodo rappresentativo (punto di riferimento) con sei gradi di libertà per ciascun corpo che rappresentano il movimento traslatorio e rotatorio di ciascun corpo
- Trasformazione delle matrici di rigidità dell'elemento sostituendo i gradi di libertà originali con i gradi di libertà dei nodi rappresentativi
- Assemblaggio delle matrici di rigidità dell'elemento trasformato per determinare la matrice di rigidità di dimensioni ridotte
Vantaggi
La soluzione è molto più veloce. Il miglioramento della prestazione si basa sull'adozione della tecnica Singular Value Decomposition (SVD) che viene eseguita sulla matrice di rigidità ridotta. Le rigidità ridotte vengono calcolate dall'interazione della superficie di interfaccia tra i corpi originati da condizioni di delimitazione, interazioni di vincolo e contatto o connettori.
Di seguito un esempio di una matrice di rigidità ridotta:
|
|
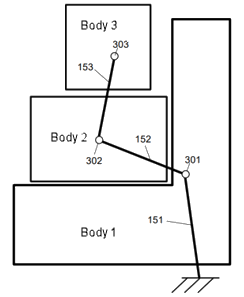 |
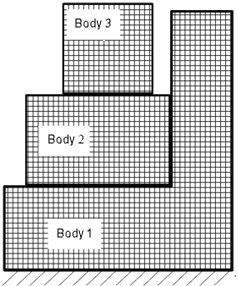
| Ogni corpo si riduce a un punto di riferimento nella matrice di rigidità. La matrice di rigidità globale si riduce da centinaia di migliaia di gradi di libertà a soli 18 (3 corpi x 6 gradi di libertà). |
Il metodo considera le rigidità che derivano dalle interazioni tra i corpi. I corpi 1 e 2 entrano in contatto, quindi il metodo considera l'effetto delle loro rigidità tra i relativi punti di riferimento. Il metodo considera anche le rigidità che derivano dalle condizioni di delimitazione, ad esempio la rigidità tra il Corpo 1 e il suolo. |
La tecnica SVD scompone la matrice di rigidità ridotta in tre matrici.
I vettori U e V sono ortonormali l'uno rispetto all'altro e descrivono la forma del campo di spostamento. La matrice centrale è una matrice diagonale. I termini diagonali rappresentano le rigidità relative dei collegamenti tra i corpi o tra il corpo e il suolo. Se uno dei termini diagonali è zero o prossimo allo zero, significa che si tratta di una modalità corpo rigido.
È possibile visualizzare le animazioni degli spostamenti non vincolati dell'intero assieme.
È possibile visualizzare le traslazioni o le rotazioni animate in direzioni oblique.