Narzędzie Niewystarczająco powiązane obiekty umożliwia wykrywanie wszelkich trybów sztywnego (lub swobodnego) obiektu dla obiektów, które nie są odpowiednio podparte umocowaniami, złączami lub warunkami interakcji wiązania.
Aby wykryć niewystarczająco powiązane obiekty, należy wykonać jedną z następujących czynności:
- W drzewie badania statycznego kliknąć prawym przyciskiem myszy Połączenia
 , a następnie kliknąć Obiekty niewystarczająco powiązane
, a następnie kliknąć Obiekty niewystarczająco powiązane  .
.
- Z poziomu CommandManager wybrać opcję Narzędzia diagnostyczne i kliknąć Obiekty niewystarczająco powiązane .
- W oknie dialogowym wybrać Automatycznie wykrywaj niewystarczająco powiązane obiekty.
Zaleca się, aby przed uruchomieniem narzędzia Niewystarczająco powiązane obiekty zdefiniować realistyczne materiały, obciążenia i warunki brzegowe dla modelu. Właściwości badania powinny uwzględniać z jak największą dokładnością obciążenia robocze i warunki brzegowe analizowanego modelu.
Algorytm sprawdza istnienie swobodnych translacji i obrotów dla każdej części złożenia w globalnym kierunku X, Y i Z, a także w kierunkach skośnych. Może wykrywać problemy ze stabilnością w złożeniach z mechanizmami łańcuchowymi (lub zawiasami) pomiędzy częściami. W przypadku wykrycia trybów swobodnego obiektu narzędzie Niewystarczająco powiązane obiekty odpowiednio je animuje.
Wykrywanie niewystarczająco powiązanych obiektów polega na przekształceniu macierzy sztywności związanej z modelem elementów skończonych w macierz sztywności o zmniejszonym rozmiarze (zwykle o trzech translacyjnych i trzech obrotowych stopniach swobody na obiekt). Niewystarczająco powiązane tryby zredukowanego systemu są równoważne oryginalnemu układowi równań.
Przekształcenie globalnej macierzy sztywności w macierz sztywności o zmniejszonym rozmiarze zostaje ukończone przez:
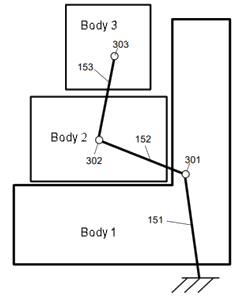
- Wprowadzenie jednego węzła reprezentatywnego (punktu odniesienia) z sześcioma stopniami swobody dla każdego obiektu, który reprezentuje ruch translacyjny i obrotowy każdego obiektu
- Transformację macierzy sztywności elementów poprzez zastąpienie oryginalnych stopni swobody stopniami swobody węzłów reprezentatywnych
- Składanie transformowanych macierzy sztywności elementów w celu określenia macierzy sztywności o zmniejszonym rozmiarze
Zalety
Rozwiązanie jest dużo szybsze. Poprawa wydajności wynika z zastosowania techniki Singular Value Decomposition (SVD), którą stosuje się dla zredukowanej macierzy sztywności. Zredukowane sztywności obliczane są na podstawie interakcji powierzchni interfejsu pomiędzy obiektami pochodzącymi z warunków brzegowych, interakcji wiązaniowych lub kontaktowych albo złączy.
Poniżej przedstawiono przykład zredukowanej macierzy sztywności:
|
|
 |
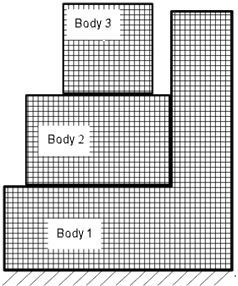
| Każdy obiekt zostaje zredukowany do jednego punktu odniesienia w macierzy sztywności. Globalna macierz sztywności redukuje setki tysięcy stopni swobody do zaledwie 18 (3 obiekty x 6 stopni swobody). |
Zaawansowana metoda uwzględnia sztywności wynikające z interakcji pomiędzy obiektami. Obiekty 1 i 2 mają kontakt, więc metoda uwzględnia wpływ ich sztywności na ich punkty odniesienia. Metoda uwzględnia sztywności wynikające również z warunków brzegowych, a także na przykład sztywność pomiędzy Obiektem 1 a podłożem. |
Technika SVD dekomponuje zredukowaną macierz sztywności do trzech macierzy.
Wektory U i V są ortonormalne względem siebie i opisują kształt pola przemieszczenia. Macierz środkowa to macierz diagonalna. Warunki diagonalne reprezentują sztywności względne łączy między obiektami lub pomiędzy obiektem a podłożem. Jeśli któryś z warunków przekątnych wynosi zero lub jest bliski zeru, interpretuje się to jako wskazanie trybu sztywnego obiektu.
Istnieje możliwość oglądania animacji niepowiązanych przemieszczeń całego złożenia.
Można oglądać animowane translacje lub obroty w kierunkach skośnych.