Você pode usar a ferramenta Corpos sub-restritos para detectar qualquer modo de corpo rígido (ou livre) de corpos que não sejam adequadamente aceitos por acessórios de fixação, conectores ou condições de interação de contato.
Para detectar corpos sub-restritos, execute um dos seguintes procedimentos:
- Em uma árvore de estudos estáticos, clique com o botão direito em Conexões
 e clique em Corpos sub-restritos
e clique em Corpos sub-restritos  .
.
- No CommandManager, selecione Ferramentas de diagnóstico e clique em Corpos sub-restritos .
- Na caixa de diálogo , selecione Detectar automaticamente corpos sub-restritos.
Como prática recomendada, antes de executar a ferramenta Corpos sub-restritos, defina materiais, cargas e condições de limite realistas para seu modelo. As propriedades do estudo devem refletir, do modo mais preciso possível, as cargas operacionais e condições de limite do modelo que você está tentando analisar.
Para cada peça de uma montagem, o algoritmo verifica a existência de translações e rotações livres na direção global X, Y e Z e também em direções oblíquas. Também é capaz de detectar problemas de instabilidade em montagens com mecanismos de corrente (ou dobradiça) entre as peças. Nos casos em que os modos de corpo livre são detectados, a ferramenta Corpos sub-restritos faz a animação deles de acordo.
O método de detecção de corpos sub-restritos transforma a matriz de rigidez associada a um modelo de elemento finito em uma matriz de rigidez de tamanho reduzido (normalmente com três graus de liberdade de translação e três de rotação por corpo). Os modos sub-restritos do sistema reduzido são equivalentes ao sistema original de equações.
A transformação da matriz de rigidez global em uma matriz de rigidez de tamanho reduzido é concluída por:
- Apresentação de um único nó representativo (ponto de referência) com seis graus de liberdade para cada corpo, que representa movimento de translação e rotação de cada corpo
- Transformar as matrizes de rigidez de elementos substituindo os graus originais de liberdade pelos graus de liberdade dos nós representativos
- Montar as matrizes de rigidez do elemento transformado para determinar a matriz de rigidez de tamanho reduzido
Vantagens
A solução é muito mais rápida. A melhoria do desempenho é baseada na adoção da técnica de decomposição do valor singular (SVD), que é realizada sobre a matriz de rigidez reduzida. A rigidez reduzida é calculada a partir da interação da superfície da interface entre corpos originados de condições de limite, interações de contato ou conectores.
Veja a seguir um exemplo de uma matriz de rigidez reduzida:
|
|
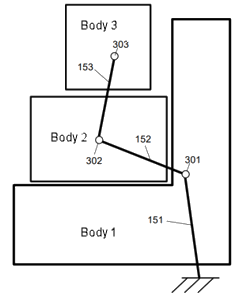 |
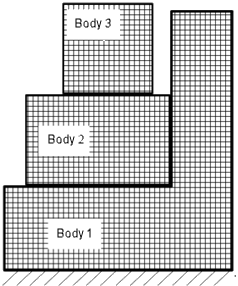
| Cada corpo é reduzido a um ponto de referência na matriz de rigidez. A matriz de rigidez global reduz de centenas de milhares de graus de liberdade para apenas 18 (3 corpos x 6 graus de liberdade). |
O método considera a rigidez que se origina das interações entre corpos. Os corpos 1 e 2 entram em contato, portanto, o método considera o efeito de sua rigidez entre seus pontos de referência. O método considera a rigidez que se origina de condições de limite, por exemplo, a rigidez entre o corpo 1 e o solo. |
A técnica SVD decompõe a matriz de rigidez reduzida para três matrizes.
Os vetores U e V são ortonormais entre si e descrevem a forma do campo de deslocamento. A matriz intermediária é uma matriz diagonal. Os termos diagonais representam a rigidez relativa dos vínculos entre os corpos ou entre um corpo e o solo. Se qualquer um dos termos diagonais for zero ou próximo de zero, será indicação de um modo de corpo rígido.
Você pode exibir animações dos deslocamentos sem restrições de toda a montagem.
Você pode visualizar translações ou rotações animadas em direções oblíquas.