Можно использовать утилиту Недостаточно ограниченные тела, чтобы обнаружить любые режимы жестких (или свободных) тел без адекватной поддержки крепежами, соединителями или связанными условиями взаимодействия.
Для обнаружения недостаточно ограниченных тел выполните одно из следующих действий:
- В дереве статического исследования нажмите правой кнопкой мыши на Соединения
 и выберите Недостаточно ограниченные тела
и выберите Недостаточно ограниченные тела  .
.
- В CommandManager выберите Диагностические инструменты и нажмите Недостаточно ограниченные тела .
- В диалоговом окне выберите Автоматически определять недостаточно ограниченные тела.
Рекомендуется перед запуском утилиты Недостаточно ограниченные тела определить реалистичные материалы, нагрузки и граничные условия для модели. Свойства исследования должны отражать самым точным из возможных образом эксплуатационные нагрузки и граничные условия модели, для которой выполняется анализ.
Для каждой детали сборки алгоритм проверяет наличие свободных перемещений и вращений в рамках глобальных направлений X, Y и Z, а также в наклонных направлениях. Также он может определить неполадки стабильности сборок с механизмами цепочки (или шарниров) между деталями. В случаях обнаружения свободных моделей тела утилита Недостаточно связанные тела анимирует их соответствующим образом.
Метод расширенного обнаружения недостаточно ограниченных тел преобразует матрицу жесткости, связанную с моделью конечных элементов, в уменьшенную матрицу жесткости (обычно с тремя поступательными и тремя вращательными степенями свободы для каждого тела). Недостаточно ограниченные режимы уменьшенной системы эквивалентны исходной системе уравнений.
Преобразование глобальной матрицы жесткости в уменьшенную матрицу жесткости выполняется путем:
- Представления одного образцового узла (справочной точки) с шестью степенями свободы для каждого тела, которые представляют собой поступательное и вращательное движение каждого тела;
- преобразования матриц жесткости элементов с помощью замены исходных степеней свободы на степени свободы образцовых узлов;
- сборки преобразованных матриц жесткости элементов для определения уменьшенной матрицы жесткости.
Преимущества
Решение работает намного быстрее. Улучшение производительности основано на использовании методики разложения единичных значений (SVD), которое выполняется в матрице уменьшенной жесткости. Уменьшенная жесткость рассчитывается на основе взаимодействия поверхности интерфейса между телами, исходящими из граничных условий, связанных и контактных взаимодействий или соединителей.
Ниже приведен пример матрицы уменьшенной жесткости.
|
|
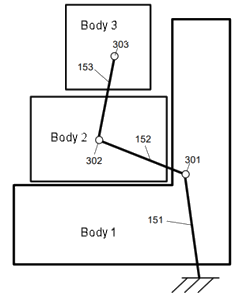 |
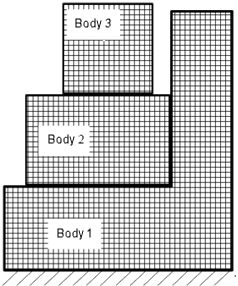
| Каждое тело уменьшается до одной справочной точки в матрице жесткости. Глобальная матрица жесткости уменьшается с сотен тысяч степеней свободы до 18 (3 тела x 6 степеней свободы). |
Расширенный метод учитывает жесткость, которая возникает из взаимодействий между телами. Тела 1 и 2 вступают в контакт, поэтому метод учитывает влияние жесткости между их справочными точками. Метод учитывает жесткость, которая также исходит от граничных условий, например жесткость между Телом 1 и землей. |
Методика SVD позволяет разложить матрицу уменьшенной жесткости на три матрицы.
Векторы U и V ортогональны друг другу и описывают форму поля перемещения. Средняя матрица представляет собой диагональную матрицу. Диагональные условия представляют собой относительную жесткость связей между телами или между телом и землей. Если любое из диагональных условий равно нулю или близко к нулю, это указывает на режим жесткого тела.
Можно просмотреть анимации неограниченных перемещений всей сборки.
Можно просматривать анимированные перемещения или вращения в наклонных направлениях.