接触稳定可在合格区域接触之前为其添加一个小刚度。 接触稳定算法可以解决欠约束条件相关问题。
解算器可以在发生接触之前解决在求解开始时遇到的不稳定问题。 默认情况下,软件始终会将接触稳定应用于初始间隙在模型特性长度 1% 阈值范围内的几何图形。
您可以自定义实体之间的间隙以使其符合接触稳定的条件。 可从以下位置使用选项
如果缝隙为以下值,则稳定区域:特性长度的 value %:
- (全局级别)
- 零部件交互 PropertyManager(零部件级别)
- 局部交互 PropertyManager(局部级别)
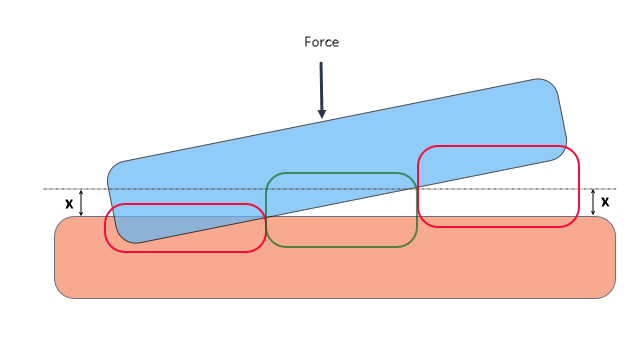
例如,对于如下图所示相互接触的两个实体,绿色框内的区域有资格实施接触稳定,因为它们的间隙在间隙阈值 (x) 内。 红色框内的区域不符合接触稳定的条件,因为它们相互干涉或其间隙超过缝隙阈值。