您可以使用欠约束实体工具来检测夹具、接头或接合交互条件未充分支持的实体的任何刚性(或自由)实体模式。
要检测欠约束的实体,请执行以下操作之一:
- 从静态算例树中,右键单击连接
 ,然后单击欠约束实体
,然后单击欠约束实体  。
。
- 在 CommandManager 中,选择诊断工具,然后单击欠约束实体 。
- 从对话框中,选择自动检测欠约束实体。
作为最佳实践,在运行欠约束实体工具之前,为您的模型定义真实的材料、载荷和边界条件。算例属性应尽可能准确地反映所要分析模型的操作载荷和边界条件。
对于装配体的每个零件,算法都会检查全局 X、Y 和 Z 方向以及倾斜方向中是否存在自由平移和旋转。它还能够利用零件间的链(或合叶)机构检测装配体中的不稳定问题。在检测到自由实体模式的情况下,欠约束实体工具会相应地对其进行动画处理。
欠约束实体的检测基于将与有限元模型关联的刚度矩阵转换为缩减的刚度矩阵(通常每个实体有三个平移和三个旋转自由度)。缩减系统的欠约束模式等同于原始方程式系统。
整体刚度矩阵转换为缩减大小刚度矩阵的完成方式如下:
- 为展示每个实体平移和旋转运动的每个实体引入一个具有六个自由度的代表性节点(参考点)
- 通过将原始自由度替换为代表性节点的自由度来转换元素刚度矩阵
- 装配转换的元素刚度矩阵以确定缩减大小刚度矩阵
优势
求解速度快得多。性能改进基于采用奇异值分解 (SVD) 技术,该技术在缩减的刚度矩阵上执行。缩减的刚度是根据源自边界条件、接合和接触交互或接头的实体之间的接口曲面交互计算得出的。
下面是缩减的刚度矩阵的示例:
|
|
 |
| 每个实体在刚度矩阵中缩减到一个参考点。整体刚度矩阵从数十万自由度缩减到仅 18 个自由度(3 个实体 x 6 个自由度)。 |
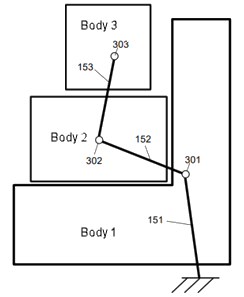
该方法考虑源于实体之间交互的刚度。实体 1 和 2 接触,因此该方法考虑其参考点之间刚度的影响。该方法还考虑源自边界条件的刚度,例如,实体 1 和地面之间的刚度。 |
SVD 技术将缩减的刚度矩阵分解为三个矩阵。
U 和 V 向量彼此正交,并描述位移场的形状。中间矩阵是对角矩阵。对角项表示实体之间或实体与地面之间的链接的相对刚度。如果任何对角项为零或接近零,则这表示刚性实体模式。
您可以查看整个装配体的无约束位移的动画。
您可以查看倾斜方向的平移或旋转动画。