接触安定化は、接触する前に適格領域に小さな剛性を追加します。 接触安定化アルゴリズムは、拘束条件が不足している状態を解決できます。
ソルバは、接触が開始される前に、解の開始時に発生した不安定性の問題を解決できます。 デフォルトでは、モデルの特性長さの 1% のしきい値内に初期クリアランスがあるジオメトリには、常に接触安定化が適用されます。
エンティティ間のクリアランスをカスタマイズして、接触安定化の対象にできます。 オプション
ギャップが次の場合、領域を安定化: % 特性長さ(Stabilize the area if the gap is value % of characteristic length)は、次の場所から利用できます。
-
(グローバルレベル)
- コンポーネント相互作用(Component Interactions)PropertyManager(構成部品レベル)
- ローカル相互作用(Local Interactions)PropertyManager(ローカルレベル)
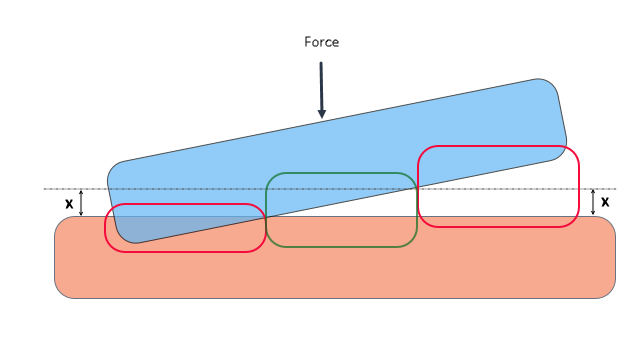
たとえば、下の図に示すように接触する 2 つのボディの場合、緑のフレーム内の領域は、ギャップしきい値(x)内にあるため、接触安定化の対象となります。 赤いフレーム内の領域は接触安定化の対象とはなりません。干渉しているか、クリアランスがギャップのしきい値を超えているためです。