El PropertyManager
Carga/Masa remota permite aplicar cargas remotas, masas remotas y desplazamientos remotos para análisis estáticos, análisis estáticos no lineales y análisis de topología.
Para los análisis de frecuencia, análisis de pandeo, análisis dinámicos lineales y no lineales, consulte el PropertyManager Carga/Masa remota (para análisis de frecuencia, análisis dinámicos lineales, análisis de pandeo y análisis dinámicos no lineales).
No se puede aplicar una carga remota o masa remota en un estudio de espectros de respuesta dinámica lineal.
Para acceder al PropertyManager Cargas/Masa remotas, lleve a cabo una de estas acciones:
- En el gestor de Simulation, haga clic con el botón derecho del ratón en la carpeta Cargas externas y seleccione Carga/Masa remota.
- Haga clic en .
- Haga clic en Carga/Masa remota
 (barra de herramientas Aplicar cargas).
(barra de herramientas Aplicar cargas).
Selección
| Caras |
Seleccione las caras a las que desea aplicar cargas remotas, masas remotas o traslaciones y rotaciones remotas. |
Sistema de coordenadas de referencia
Define el sistema de coordenadas para interpretar la ubicación y las instrucciones de las operaciones remotas.
| Global |
El sistema global de coordenadas se utiliza de forma predeterminada. El sistema global de coordenadas está basado en el plano Frontal, el cual tiene su origen en el Origen de la pieza o ensamblaje. |
|
Definido por el usuario
|
Haga clic en Seleccionar un sistema de coordenadas  . A continuación, seleccione un sistema de coordenadas del gestor del FeatureManager desplegable. El sistema global de coordenadas (Plano alzado) se utiliza de manera predeterminada si no se ha seleccionado un sistema de coordenadas. Este sistema se utiliza para interpretar la ubicación y las instrucciones de la operación remota. . A continuación, seleccione un sistema de coordenadas del gestor del FeatureManager desplegable. El sistema global de coordenadas (Plano alzado) se utiliza de manera predeterminada si no se ha seleccionado un sistema de coordenadas. Este sistema se utiliza para interpretar la ubicación y las instrucciones de la operación remota. |
Ubicación
Define las coordenadas de la ubicación del nodo de referencia.

|
Unidades
|
Define las unidades para las coordenadas del nodo remoto |
| 
|
Coordenada X
|
La coordenada X del punto de aplicación de la masa, traslación o carga remota en referencia al sistema de coordenadas seleccionado (o al sistema de coordenadas global). |
| 
|
Coordenada Y
|
La coordenada Y del punto de aplicación de la masa, traslación o carga remota en referencia al sistema de coordenadas seleccionado (o al sistema de coordenadas global). |
| 
|
Coordenada Z
|
La coordenada Z del punto de aplicación de la masa, traslación o carga remota en referencia al sistema de coordenadas seleccionado (o al sistema de coordenadas global). |
Componentes traslacionales
Define las fuerzas remotas y las traslaciones remotas.
|
Unidades |
Define las unidades para las cargas remotas y las traslaciones remotas. |
|
|
Dirección X |
Define el valor de una fuerza remota o traslación remota en la dirección X. |
|
|
Dirección Y |
Define el valor de una fuerza remota o traslación remota en la dirección Y. |
|
|
Direction Z |
Define el valor de una fuerza remota o traslación remota en la dirección Z. |
Componentes de rotación
Define los momentos remotos y las rotaciones remotas
|
Unidades |
Define las unidades para los momentos remotos y las rotaciones remotas. |
|
|
Dirección X |
Define el valor de un momento remoto o una rotación remota en la dirección X. |
|
|
Dirección Y |
Define el valor de un momento remoto o una rotación remota en la dirección Y. |
|
|
Direction Z |
Define el valor de un momento remoto o una rotación remota en la dirección Z. |
Tipo de conexión
El acoplamiento distribuido restringe el movimiento de los nodos de acoplamiento a la traslación y la rotación del nodo de referencia en el que se aplica la operación remota.
La restricción del acoplamiento distribuido se aplica determinando un promedio de tal forma que se pueda controlar la transmisión de cargas remotas y los desplazamientos mediante factores de ponderación en los nodos de acoplamiento. El acoplamiento distribuido permite que los nodos de acoplamiento de la geometría seleccionada se muevan relacionados entre sí.
| Distribuida |
Si hay varios nodos de acoplamiento, la distribución de la masa y de las fuerzas/momentos remotos no se determina solo con el equilibrio, sino que se utilizan factores de ponderación para la distribución.
|
Factor de ponderación: Predeterminado (constante)
|
Distribución con ponderación uniforme. Todos los factores de peso wi son iguales a 1.
|
|
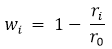
Linear
|
Los factores de ponderación disminuyen linealmente en función de la distancia con respecto al nodo de referencia.
|
|
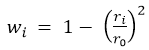
Cuadrático
|
Los factores de ponderación disminuyen en función de la distancia con respecto al nodo de referencia y aplicando una fórmula polinómica cuadrática.
|
|
Cúbico
|
Los factores de ponderación disminuyen en función de la distancia con respecto al nodo de referencia y aplicando una fórmula polinómica cúbica.
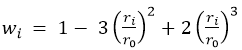
wi es el factor de peso en el nodo de acoplamiento i, ri es la distancia radial del nodo de acoplamiento desde el nodo de referencia y r0 es la distancia hasta el nodo de acoplamiento más lejano.
|
|
| Rígida |
Los nodos de acoplamiento no se mueven en relación con el otro. Unas barras rígidas conectan el punto de referencia a los nodos de acoplamiento y pueden surgir altos niveles de tensión. Las caras donde se aplican los desplazamientos o cargas remotas se comportan como sólidos rígidos. |
Mass
Define los componentes de la masa remota.
|
Unidades |
Define las unidades de los componentes de la masa remota. |
| 
|
Masa remota
|
Define el valor de la masa remota. |
| 
|
Momento de inercia
|
Define el momento de inercia de la masa con respecto al eje X. |
| 
|
Momento de inercia
|
Define el momento de inercia de la masa con respecto al eje Y. |
| 
|
Momento de inercia
|
Define el momento de inercia de la masa con respecto al eje Z. |
| 
|
Momento de inercia
|
Define el producto de inercia con respecto a los ejes X e Y. |
| 
|
Momento de inercia
|
Define el producto de inercia con respecto a los ejes Y y Z. |
| 
|
Momento de inercia
|
Define el producto de inercia con respecto a los ejes X y Z. |
Los momentos de inercia de la masa se calculan con respecto a un sistema de coordenadas que está centrado en el CG, y tiene ejes X-Y-Z paralelos a los ejes X-Y-Z del sistema de coordenadas global o definido por el usuario.
Variación en el tiempo
En el caso de estudios no lineales, puede definir cargas remotas dependientes del tiempo.
Variación con frecuencia
En el caso de estudios de vibración armónicos y aleatorios puede definir cargas remotas dependientes de la frecuencia.
Configuración de símbolos
| |
Editar color
|
Modifica el color de los símbolos de carga remota. |

|
Tamaño de símbolo
|
Utilice las flechas de incremento y disminución para aumentar o disminuir el tamaño de los símbolos de carga remota.
|
| |
Vista preliminar
|
Active y desactive la visualización de los símbolos de carga remota.
|