El conector tipo pasador mejorado se ha ampliado a los estudios dinámicos no lineales y estáticos no lineales. Puede definir un conector de pasador a través de más de dos superficies cilíndricas en una definición.
Puede definir un único conector tipo pasador asociado a varias caras cilíndricas coaxiales (máximo de diez).
En el PropertyManager Conector tipo pasador, en Aristas/caras cilíndricas  , seleccione todas las caras cilíndricas coaxiales (o aristas) que estén asociadas al pasador (máximo de diez). Las caras cilíndricas o las aristas circulares seleccionadas pueden pertenecer a uno o varios sólidos.
, seleccione todas las caras cilíndricas coaxiales (o aristas) que estén asociadas al pasador (máximo de diez). Las caras cilíndricas o las aristas circulares seleccionadas pueden pertenecer a uno o varios sólidos.
Por ejemplo, para los dos modelos que se muestran a continuación, puede definir dos pasadores (uno para cada modelo) para conectar las dos piezas giratorias y los seis cilindros de una chapa con bisagras. A continuación, puede ejecutar un estudio dinámico no lineal o estático no lineal.
El solver calcula las fuerzas del conector tipo pasador en las dos uniones de pasador por segmento de pasador (un segmento de pasador se asocia a dos caras cilíndricas). El factor de seguridad para cada conector tipo pasador se calcula en función del FDS mínimo en las uniones de pasador para el conector tipo pasador seleccionado. La rigidez rotacional y axial total que defina para un conector tipo pasador se distribuye de acuerdo con las características geométricas de cada segmento de pasador, como por ejemplo: área de sección transversal, longitud y momento de inercia polar.
Por ejemplo, para una definición de un solo pasador que conecta cuatro cilindros de una placa con bisagra, el solver calcula las fuerzas del pasador en cuatro uniones de pasador. Cada unión de pasador se encuentra en el centro de gravedad de cada cara cilíndrica asociada al pasador.
Al ver los resultados del conector tipo pasador, en el PropertyManager Fuerza resultante, haga clic en una celda de la tabla en Fuerza de conector para resaltar la ubicación de la unión de pasador seleccionada. Una anotación enumera las fuerzas del pasador en la unión seleccionada. Las direcciones de las fuerzas resultantes del pasador con respecto al sistema de coordenadas local del pasador también se muestran: fuerza cortante resultante, fuerza axial resultante, momento flector resultante y torsión resultante.
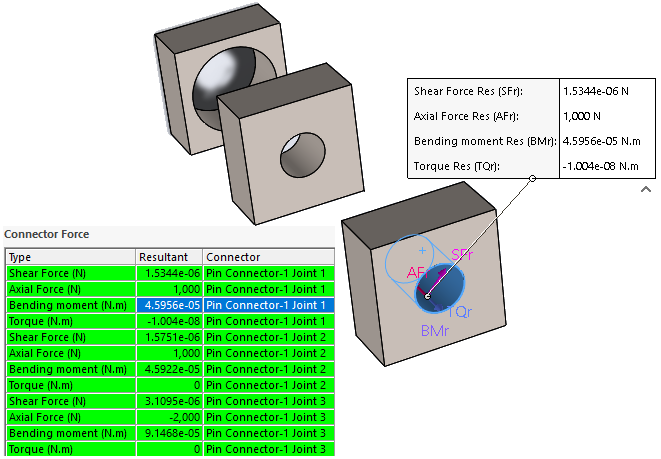
Haga clic en Enumerar componentes X,Y,Z para enumerar los componentes X, Y y Z de las fuerzas del pasador con respecto al sistema de coordenadas global.