Контекст:
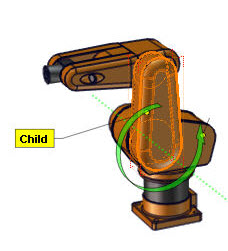
В примере ниже задано следующее исходное положение.
-
Выберите
 .
.
В результате включается режим преобразования точки вращения.
-
Переместите локальную систему координат в местоположение кинематической связи с помощью команды Задать точку вращения на линии/оси
 .
.
-
С помощью команды Выровнять точки вращения по заданной точке вращения
 выровняйте дочернюю и родительскую системы координат.
выровняйте дочернюю и родительскую системы координат.
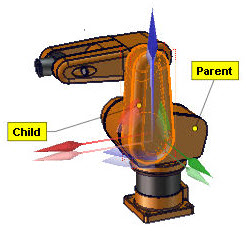
Прим.:
Если выровнять обе системы координат не удается, добавьте фиксированный родительский объект.
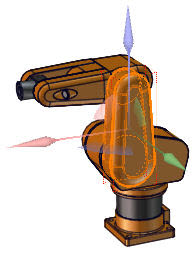
Конечное положение; показаны степени свободы: