Метод расширенного обнаружения недостаточно ограниченных тел вычисляет и отображает жесткие (или свободные) режимы модели из-за нестабильности во время имитационного моделирования.
Присутствует в SOLIDWORKS Simulation Professional и SOLIDWORKS Simulation Premium.
Метод расширенного обнаружения недостаточно ограниченных тел преобразует матрицу жесткости, связанную с моделью конечных элементов, в уменьшенную матрицу жесткости (обычно с тремя поступательными и тремя вращательными степенями свободы для каждого тела). Затем выполняется оценка недостаточно ограниченных режимов уменьшенной системы, которая эквивалентна исходной системе уравнений.
Преобразование глобальной матрицы жесткости в уменьшенную матрицу жесткости выполняется путем:
- представления одного образцового узла (справочной точки) с шестью степенями свободы для каждого тела, которые представляют собой поступательное и вращательное движение каждого тела;
- преобразования матриц жесткости элементов с помощью замены исходных степеней свободы на степени свободы образцовых узлов;
- сборки преобразованных матриц жесткости элементов для определения уменьшенной матрицы жесткости.
Преимущества
Решение работает намного быстрее. Обнаружение режимов жесткого тела модели, которая запускается в SOLIDWORKS Simulation Standard несколько часов, занимает всего несколько секунд. Улучшение производительности основано на использовании методики разложения единичных значений (SVD), которое выполняется в матрице уменьшенной жесткости. Уменьшенная жесткость рассчитывается на основе взаимодействия поверхности интерфейса между телами, исходящими из граничных условий, связанных и контактных взаимодействий или соединителей.
Ниже приведен пример матрицы уменьшенной жесткости.
|
|
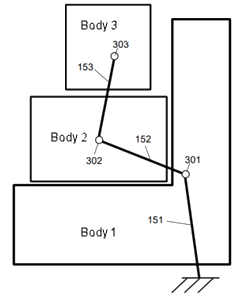 |
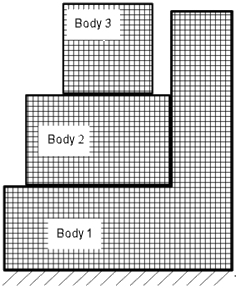
| Каждое тело уменьшается до одной справочной точки в матрице жесткости. Глобальная матрица жесткости уменьшается с сотен тысяч степеней свободы до 18 (3 тела x 6 степеней свободы). |
Расширенный метод учитывает жесткость, которая возникает из взаимодействий между телами. Тела 1 и 2 вступают в контакт, поэтому метод учитывает влияние жесткости между их справочными точками. Метод учитывает жесткость, которая также исходит от граничных условий, например жесткость между Телом 1 и землей. |
Методика SVD позволяет разложить матрицу уменьшенной жесткости на три матрицы.
Векторы U и V ортогональны друг другу и описывают форму поля перемещения. Средняя матрица представляет собой диагональную матрицу. Диагональные условия представляют собой относительную жесткость связей между телами или между телом и землей. Если любое из диагональных условий равно нулю или близко к нулю, это указывает на режим жесткого тела.
Анализ в SOLIDWORKS Simulation Standard основывается на методике разложения Lower-Upper (LU), которое выполняется на большой исходной матрице жесткости. Анализ занимает очень много времени.
Можно просмотреть анимации неограниченных перемещений всей сборки.
Можно просматривать анимированные перемещения или вращения в наклонных направлениях. В SOLIDWORKS Simulation Standard можно просматривать свободные движения только в глобальных направлениях.