| Uso de um plano de referência
|
Um plano de referência (ou face plana) define duas direções no seu plano e uma terceira direção que é normal ao plano. As duas direções do plano são chamadas de Dir. do plano 1 e Dir. do plano 2. Elas são paralelas aos limites do plano e atribuídas internamente pelo programa. Essas direções não podem ser modificadas. Ao aplicar restrições e cargas, selecione Mostrar visualização para identificar a Dir. do plano 1 e a Dir. do plano 2. As setas dos símbolos de restrição ou carga apontam para a Dir. do plano 1 positiva e a Dir. do plano 2, e são normais às direções do plano.
É possível identificar a direção normal através da regra da mão direita: pontos do dedo polegar para Plano Dir 1 positivo, pontos do dedo indicador para Plano Dir 2 positivo, pontos do dedo médio para direção normal positiva.
Para as direções de propriedades do material, o Dir 1 alinha-se com X-dir, Dir 2 com Y-dir e normal para o plano com Z-dir.
|
| Usando os planos Frontal, Direito e Superior como geometria de referência. |
A tabela lista a orientação de direção em relação ao sistema de coordenadas global, quando você seleciona um dos planos Frontal, Direita ou Superior como geometria de referência.
| Plano frontal |
Dir 1 alinhada à direção X global. Dir 2 alinhada à direção Y global.
Normal ao plano alinhada à direção Z global.
|
| Plano direito |
Dir 1 alinhada à direção Z global. Dir 2 alinhada à direção Y global.
Normal ao plano alinhada à direção X global.
|
| Plano superior |
Dir 1 alinhada à direção X global. Dir 2 alinhada à direção Z global.
Normal ao plano alinhada à direção Y global.
|
|
| Sistemas de coordenadas
|
Um sistema de coordenadas define 3 direções, X, Y e Z. O sistema de coordenadas predeterminado usado pelo software, chamado de sistema de coordenadas global, é baseado no Plano1 (Plano frontal). A origem do sistema de coordenadas global está localizada na origem da peça ou da montagem. O Plano1 é o plano de referência superior que aparece na árvore de projetos do FeatureManager. A tríade de referência mostra as direções globais X, Y, e Z. Todos outros sistemas de coordenadas fazem referência aos sistemas de coordenadas locais. Você pode definir um sistema de coordenadas local com .
|
| Uso de um eixo de referência |
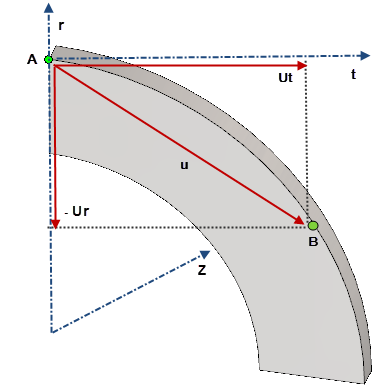
Um eixo de referência define uma direção radial, uma direção circunferencial e uma direção axial. Ao aplicar restrições e cargas, marque a caixa de seleção Mostrar visualização do PropertyManager para identificar as direções positivas. Use valores negativos para indicar sentidos opostos.Ao especificar uma translação circunferencial, você deve especificar o ângulo (Θ) em graus. Isto configura a translação na direção circunferencial (v) com: v = r.Θ, onde r é o raio do nó no qual a restrição é aplicada em relação ao eixo de referência. Ao exibir os resultados de deformação em relação a um eixo de referência, os vetores de deslocamento são relatados como Ur, Ut e Uz, em que r representa a direção radial, t a direção tangencial e z a direção axial. Este sistema r- t- z é definido em relação a cada nó da configuração original.
Assumindo um quarto de anel como exemplo, suponha que um nó A é deslocado da sua posição inicial ao ponto B e o vetor de deslocamento no final de uma solução não linear é definido por u. O programa informa para o deslocamento radial Ur um valor negativo na direção radial original do nó A e, para a direção tangencial, um valor positivo Ut na direção tangencial original do nó A. Observe que Ur não necessariamente indica uma expansão (ou contração) do anel e Ut também não indica uma rotação do anel.
 |
| Uso da face cilíndrica |
É semelhante ao uso de um eixo de referência. O eixo de uma face cilíndrica é usado como eixo de referência. |
| Uso da aresta reta
|
Uma aresta reta define uma direção. Ao aplicar restrições e cargas, marque a caixa de seleção Exibir visualização no PropertyManager para identificar a direção positiva. |