Nástroj Podomezená těla rozpozná všechny tuhé (nebo volné) režimy těl, která nejsou dostatečně upevněna pomocí přípravků, konektorů nebo vazebních kontaktních podmínek.
Podomezená těla lze detekovat následujícími způsoby:
- Ve stromu statické studie klikněte pravým tlačítkem na položku Připojení
 a klikněte na Podomezená těla
a klikněte na Podomezená těla  .
.
- V aplikaci CommandManager vyberte možnost Diagnostické nástroje a klikněte na Podomezená těla .
- V dialogovém okně vyberte možnost Automaticky detekovat podomezená těla.
Jako nejlepší postup před spuštěním nástroje Podomezená těla definujte realistické materiály, zatížení a mezní podmínky pro váš model. Vlastnosti studie by měly odrážet co možná nejpřesněji provozní zatížení a mezní podmínky modelu, který se chystáte analyzovat.
U každého dílu sestavy algoritmus zkontroluje existenci volných posunutí a rotací v globálních směrech X, Y a Z i v šikmých směrech. Rovněž dokáže detekovat problémy s nestabilitou v sestavách s mechanismy řetězu (nebo závěsu) mezi díly. Jsou-li detekovány režimy volného těla, nástroj Podomezená těla je animuje.
Detekce podomezených těl transformuje matici tuhosti spojenou s modelem konečných prvků na matici snížené tuhosti (obvykle se třemi translačními a třemi rotačními stupni volnosti na každé tělo). Podomezené režimy redukovaného systému jsou ekvivalentní původní soustavě rovnic.
Transformace globální matice tuhosti na matici snížené tuhosti se provádí:
- Zavedením jednoho reprezentativního uzlu (referenčního bodu) se šesti stupni volnosti pro každé tělo, které představuje translační a rotační pohyb každého těla
- Transformací matice tuhosti prvků nahrazením původních stupňů volnosti stupni volnosti reprezentativních uzlů
- Sestavením matice tuhosti transformovaného prvku pro určení matice snížené tuhosti
Výhody
Řešení je mnohem rychlejší. Zlepšení výkonu je založeno na využití techniky rozkladu singulární hodnoty (SVD neboli Singular Value Decomposition), která se provádí přes matici snížené tuhosti. Snížená tuhost se vypočítá z interakce povrchu rozhraní mezi těly pocházejícími z mezních podmínek, vazebních a kontaktních interakcí nebo spojek.
Níže je uveden příklad matice snížené tuhosti:
|
|
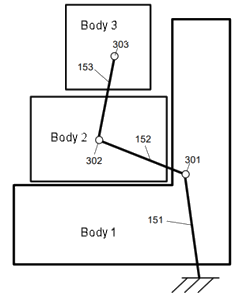 |
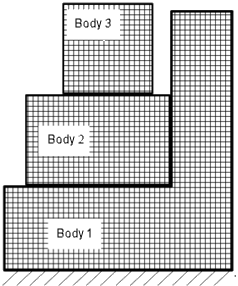
| Každé tělo se zmenší na jeden referenční bod v matici tuhosti. Globální matice tuhosti se sníží ze stovek tisíc stupňů volnosti na pouhých 18 (3 těla x 6 stupňů volnosti). |
Metoda bere v úvahu hodnoty tuhosti, které pocházejí z interakcí mezi těly. Těla 1 a 2 přicházejí do styku, takže metoda bere v úvahu účinek jejich tuhostí mezi jejich referenčními body. Metoda zvažuje tuhosti vznikající z mezních podmínek, například tuhost mezi tělem 1 a zemí. |
Technika SVD rozkládá matici snížené tuhosti na tři matice.
Vektory U a V jsou ortonormální a popisují tvar pole posunutí. Střední matice je diagonální matice. Diagonální výrazy představují relativní tuhost vazeb mezi těly nebo mezi tělem a zemí. Pokud je některý z diagonálních výrazů nulový nebo téměř nulový, pak se jedná o indikaci režimu pevného tělesa.
Můžete zobrazit animace neomezených posunů celé sestavy.
Animované posuny nebo rotace lze zobrazit v šikmých směrech.