Puede utilizar la utilidad de Sólidos con restricción insuficiente para detectar todos los modos de sólido rígido (o libre) que no se admiten de manera adecuada por los accesorios, los conectores o las condiciones de interacción rígida.
Para detectar cuerpos sin restricción, realice una de las acciones siguientes:
- Desde el gestor de estudio estático, haga clic con el botón derecho del ratón en Conexiones
 y en Sólidos con restricción insuficiente
y en Sólidos con restricción insuficiente  .
.
- En el CommandManager, seleccione Herramientas de diagnóstico y haga clic en Sólidos con restricción insuficiente .
- Desde el cuadro de diálogo , seleccione Detectar sólidos con restricción insuficiente automáticamente.
Como práctica recomendada, antes de ejecutar la herramienta Sólidos con restricción insuficiente defina unos materiales, cargas y condiciones de contorno realistas para su modelo. Las propiedades del estudio deben reflejar, de la forma más precisa posible, las cargas operativas y las condiciones de contorno del modelo que está intentando analizar.
Para cada pieza de un ensamblaje, el algoritmo comprueba la existencia de traslaciones y rotaciones libres en las direcciones X, Y y Z globales y también en direcciones oblicuas. También se pueden detectar problemas de inestabilidad en ensamblajes con mecanismos de cadena (o bisagra) entre las piezas. En los casos en los que se detectan modos de sólidos libres, la herramienta Sólidos con restricción insuficiente los anima en consecuencia.
La detección de sólidos con restricción insuficiente se basa en la transformación de la matriz de rigidez asociada con un modelo de elementos finitos en una matriz de rigidez de tamaño reducido (normalmente con tres grados de libertad traslacionales y tres rotacionales por sólido). Los modos con restricción insuficiente del sistema reducido son equivalentes al sistema original de ecuaciones.
La transformación de la matriz de rigidez global en una matriz de rigidez de tamaño reducido se completa de la siguiente manera:
- Introduciendo un único nodo representativo (punto de referencia) con seis grados de libertad para cada sólido que representa el movimiento traslacional y rotacional de cada sólido
- Se transforman las matrices de rigidez del elemento mediante el reemplazo de los grados originales de libertad con los grados de libertad de los nodos representativos
- Se ensamblan las matrices de rigidez del elemento transformadas para determinar la matriz de rigidez de tamaño reducido
Ventajas
La solución es mucho más rápida. La mejora del rendimiento se basa en la adopción de la técnica de descomposición en valores singulares (SVD) que se ejecuta sobre la matriz de rigidez reducida. La rigidez reducida se calcula a partir de la interacción de la superficie de interfaz entre sólidos procedentes de condiciones de contorno, interacciones de unión y contacto, o conectores.
El siguiente es un ejemplo de una matriz de rigidez reducida:
|
|
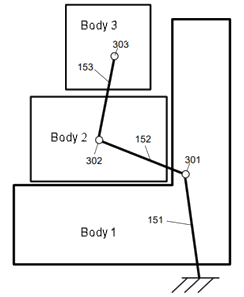 |
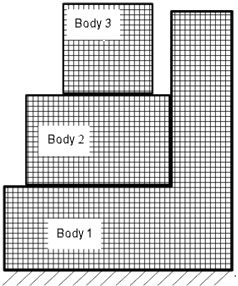
| Cada sólido se reduce a un punto de referencia en la matriz de rigidez. La matriz de rigidez global reduce de cientos de miles de grados de libertad a solo 18 (3 sólidos x 6 grados de libertad). |
El método considera la rigidez que se origina a partir de las interacciones entre los sólidos. Los sólidos 1 y 2 entran en contacto, por lo que el método considera el efecto de su rigidez entre sus puntos de referencia. El método también considera la rigidez que se origina a partir de condiciones de contorno, por ejemplo, la rigidez entre el sólido 1 y el suelo. |
La técnica SVD descompone la matriz de rigidez reducida en tres matrices.
Los vectores U y V son ortonormales entre sí y describen la forma del campo de desplazamiento. La matriz media es una matriz diagonal. Los términos diagonales representan la rigidez relativa de los vínculos entre los sólidos o entre un sólido y el suelo. Si alguno de los términos diagonales es cero o cercano a cero, se trata de una indicación de un modo de sólido rígido.
Puede ver animaciones de los desplazamientos con restricción insuficiente de todo el ensamblaje.
Puede ver traslaciones o rotaciones animadas en direcciones oblicuas.