Vous pouvez utiliser l'outil Corps sous-contraints pour détecter tous les modes de corps rigides (ou libres) des corps qui ne sont pas pris en charge de manière adéquate par les déplacements imposés, les connecteurs ou les conditions d'interaction solidaire.
Pour détecter les corps sous-contraints, effectuez l'une des opérations suivantes :
- Dans un arbre d'études statiques, cliquez avec le bouton droit de la souris sur Connexions
 , puis cliquez sur Corps sous-contraints
, puis cliquez sur Corps sous-contraints  .
.
- Dans le CommandManager, sélectionnez Outils de diagnostic , puis cliquez sur Corps sous-contraints .
- Dans la boîte de dialogue , sélectionnez Détecter automatiquement les corps sous-contraints.
Avant d'exécuter l'outil Corps sous-contraints, il est recommandé de définir des conditions de matériau, des conditions de chargement et des conditions aux limites réalistes sur votre modèle. Les propriétés de l'étude doivent refléter, aussi précisément que possible, les conditions de chargement et les conditions aux limites à l'action du modèle que vous essayez d'analyser.
Pour chaque pièce d'un assemblage, l'algorithme vérifie la présence de translations et rotations libres dans les directions X, Y et Z globales, ainsi que dans les directions obliques. Il est également capable de détecter les problèmes de stabilité dans les assemblages avec des mécanismes de chaîne (ou de pivot) entre les pièces. Dans les cas où des modes de corps libres sont détectés, l'outil Corps sous-contraints les anime en conséquence.
La méthode de détection des corps sous-contraints est basée sur la transformation de la matrice de rigidité associée à un modèle par éléments finis en matrice de rigidité de taille réduite (généralement avec trois degrés de liberté en translation et en rotation par corps). Les modes sous-contraints du système réduit sont équivalents au système d'équations d'origine.
La transformation de la matrice de rigidité globale en matrice de rigidité de taille réduite est réalisée par :
- l'introduction d'un seul nœud représentatif (point de référence) avec six degrés de liberté pour chaque corps représentant le mouvement de translation et de rotation de chaque corps ;
- la transformation des matrices de rigidité des éléments en remplaçant les degrés de liberté d'origine par les degrés de liberté des nœuds représentatifs ;
- l'assemblage des matrices de rigidité des éléments transformées pour déterminer la matrice de rigidité de taille réduite.
Avantages
La solution est beaucoup plus rapide. L'amélioration des performances est basée sur l'adoption de la technique de décomposition de la valeur singulière (SVD) effectuée sur la matrice de rigidité réduite. Les rigidités réduites sont calculées à partir de l'interaction de surface d'interface entre les corps provenant de conditions aux limites, d'interactions solidaires et de contact ou de connecteurs.
Voici un exemple de matrice de rigidité réduite :
|
|
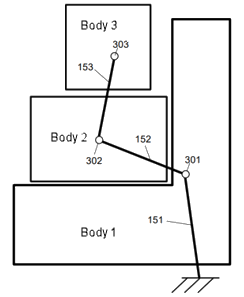 |
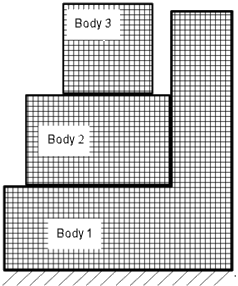
| Chaque corps est réduit à un point de référence dans la matrice de rigidité. La matrice de rigidité globale passe de centaines de milliers de degrés de liberté à seulement 18 (3 corps x 6 degrés de liberté). |
La méthode prend en compte les rigidités qui proviennent des interactions entre les corps. Les corps 1 et 2 entrent en contact, la méthode prend donc en compte l'effet de leurs rigidités entre leurs points de référence. La méthode prend également en compte les rigidités qui proviennent des conditions aux limites, par exemple, la rigidité entre le corps 1 et le sol. |
La technique SVD décompose la matrice de rigidité réduite en trois matrices.
Les vecteurs U et V sont orthonormaux l'un par rapport à l'autre et définissent la forme du champ de déplacement. La matrice du milieu est une matrice diagonale. Les termes diagonaux représentent les rigidités relatives des liens entre les corps ou entre un corps et le sol. Si l'un des termes diagonaux est égal à zéro ou proche de zéro, cela indique un mode de corps rigide.
Vous pouvez afficher des animations des déplacements non contraints de l'ensemble de l'assemblage.
Vous pouvez afficher des animations de translations ou de rotations dans des directions obliques.