파트가 다른 파트나 어셈블리 원점을 기준으로 이동할 때, 이동하는 파트의 각변위, 속도, 및 가속도를 플롯할 수 있습니다.
-
모션 해석 스터디에서 결과와 플롯
 (MotionManager 도구 모음)을 클릭합니다.
(MotionManager 도구 모음)을 클릭합니다.
- PropertyManager의 결과 아래에서, 카테고리로 변위/속도/가속도를 선택합니다.
-
하위 카테고리의 경우, 다음 중 하나를 선택합니다.
-
결과 성분 선택에서 옵션을 선택합니다.
- 크기를 선택하여 전체 좌표계를 기준으로 결과 벡터 방향의 크기를 계산합니다.
- X 부품, Y 부품 또는 Z 부품을 선택하여 전체 좌표계를 기준으로 선택 방향으로 투영된 결과의 크기를 계산합니다.
X 부품, Y 부품 또는 Z 부품 옵션은 각변위에서 사용할 수 없습니다.
-
피처 선택
 :
:
- 회전 모터를 선택하여 모터 위치의 각 운동에 대한 결과를 계산합니다.
크기의 경우 모터 PropertyManager에서 다음에 상대적으로 이동하는 부품이 비어 있으면 결과는 어셈블리의 참조 프레임을 사용합니다.
| 각변위 |
크기는 모터 PropertyManager에서 지정한 다음에 상대적으로 이동하는 부품의 참조 프레임에 있는 파트의 상대 회전을 제공합니다. 각도의 크기만 주어집니다. 각도 값은 -180°~180° 사이입니다.
|
| 각속도 |
크기는 모터 PropertyManager에서 지정한 다음에 상대적으로 이동하는 부품의 참조 프레임에 있는 파트의 상대 각속도를 제공합니다.
X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품
 을 선택하지 않는 한 전체 좌표계의 해당 축에 각속도 벡터를 투영합니다. 을 선택하지 않는 한 전체 좌표계의 해당 축에 각속도 벡터를 투영합니다.
|
| 각가속도 |
크기는 모터 PropertyManager에서 지정한 다음에 상대적으로 이동하는 부품의 참조 프레임에 있는 파트의 상대 각가속도를 제공합니다.
X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품을 선택하지 않는 한 전체 좌표계의 해당 축에 각가속도 벡터를 투영합니다.
|
- 비틀림 스프링 선택:
- 크기의 경우 기본 부품이 비어 있으면 결과는 어셈블리의 참조 프레임을 사용합니다.
- 각변위, 각속도 및 각가속도의 경우 크기는 오른손 법칙을 따르며 양수 또는 음수일 수 있습니다.
| 각변위 |
크기는 스프링의 축에 대한 기본 부품을 기준으로 스프링의 첫 번째 끝점의 상대 회전을 제공합니다. 각도 값은 -180°~180° 사이입니다.
|
| 각속도 |
크기는 스프링의 축에 대한 기본 부품을 기준으로 스프링의 첫 번째 끝점의 상대 각속도를 제공합니다.
X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품을 선택하지 않는 한 메이트의 로컬 방향으로 각속도 벡터를 투영합니다.
|
| 각가속도 |
크기는 스프링의 축에 대한 기본 부품을 기준으로 스프링의 첫 번째 끝점의 상대 각가속도를 제공합니다.
X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품을 선택하지 않는 한 메이트의 로컬 방향으로 각가속도 벡터를 투영합니다.
|
- 메이트를 선택하여 두 번째 요소의 기하학적 중심을 기준으로 첫 번째 도면요소의 기하학적 중심의 상대 각운동 결과를 계산합니다.
사용자가 결과 부품으로 X 부품, Y 부품 또는 Z 부품을 선택하지 않는 한 결과는 전체 좌표계를 기준으로 계산됩니다.
기능 억제된 각도 메이트의 경우 각변위, 각속도 또는 각가속도에 대한 결과를 얻을 수 있습니다. 기능 억제된 각도 메이트를 사용하여 각도 메이트를 정의할 수 있는 두 요소 사이의 각도를 얻을 수 있습니다.
| 각변위 |
크기는 메이트에 있는 두 파트의 상대 회전을 제공합니다. 각도의 크기만 주어집니다. 각도 값은 -180°~180° 사이입니다.
각도의 방향은 메이트의 정렬에 의해 정의됩니다. |
| 각속도 |
크기는 메이트에 있는 두 파트의 상대 각속도를 제공합니다. X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품을 선택하지 않는 한 메이트의 로컬 방향으로 각속도 벡터를 투영합니다.
|
| 각가속도 |
크기는 메이트에 있는 두 파트의 상대 각가속도를 제공합니다. X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품을 선택하지 않는 한 메이트의 로컬 방향으로 각가속도 벡터를 투영합니다.
|
- 각변위 결과를 지정하는 세 개의 비 동일선상에 있는 점을 각도로 선택합니다. 각 변위 결과는 점이 어셈블리와 함께 이동할 때 각의 모션을 계산합니다. 별도의 파트에 있는 두 점(P1 및 P2)을 선택하고 세 번째 점(P3)을 선택하여 점 사이의 초기 각도를 지정합니다.
| 각변위 |
크기는 [P1, P3] 및 [P3, P2] 세그먼트의 P3에서 각도를 제공합니다. 각도의 크기만 주어지고 크기는 항상 양수입니다. 각도 값은 0°~180° 사이입니다. |
- 한 면을 선택하여 면의 각운동에 대한 결과를 계산합니다.
| 각변위 |
크기는 전체 XY 평면에 대한 파트의 x축 수직 투영과 전체 X축 사이의 각도를 제공합니다. X축의 투영은 전체 Z 방향으로 수행됩니다. 각도는 삼각 방향으로 측정되며 각도 값은 -180°~180°입니다.
예를 들어, 파트의 xyz는 전체 XY 평면에 투영됩니다. α 각도는 각변위를 나타냅니다. 시간 = 0초에서 각도가 반드시 null인 것은 아닙니다.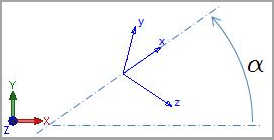
|
| 각속도 |
크기는 전체 좌표계에서 파트의 각속도 벡터의 크기인 면의 절대 각속도를 제공합니다.
X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품을 선택하지 않는 한 전체 좌표계의 해당 축에 각속도 벡터를 투영합니다.
|
| 각가속도 |
크기는 전체 좌표계에서 파트의 각속도 벡터의 크기인 면의 절대 각가속도를 제공합니다.
X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품을 선택하지 않는 한 전체 좌표계의 해당 축에 각가속도 벡터를 투영합니다.
|
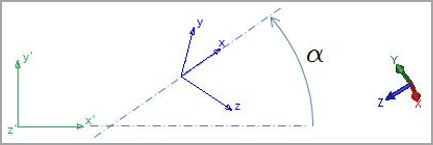
- 두 개의 면을 선택하여 두 번째 면에 의해 정의된 프레임을 기준으로 첫 번째 면의 상대 각운동 결과를 계산합니다.
| 각변위 |
크기는 두 번째 파트의 XY 평면에 대한 첫 번째 파트의 X축 수직 투영과 X축 사이의 각도를 제공합니다. X축 투영은 시간에 따라 이동할 수 있는 두 번째 파트의 Z 방향으로 수행됩니다. 각도는 삼각 방향으로 측정되며 각도 값은 -180°~180°입니다. 예를 들어, 첫 번째 파트의 좌표계 xyz가 두 번째 파트의 x'y' 평면(녹색)에 투영됩니다. 각도는 각변위를 나타냅니다. 시간 = 0초에서 각도가 반드시 null인 것은 아닙니다.
|
| 각속도 |
크기는 두 번째 파트를 기준으로 파트의 상대 각속도를 제공하며 두 번째 파트의 프레임에 있는 파트의 각속도 벡터의 크기를 나타냅니다.
X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품을 선택하지 않는 한 전체 좌표계의 해당 축에 각속도 벡터를 투영합니다.
|
| 각가속도 |
크기는 두 번째 파트를 기준으로 파트의 상대 각가속도를 제공하며 두 번째 파트의 프레임에 있는 파트의 각속도 벡터의 크기를 나타냅니다.
X 부품, Y 부품 또는 Z 부품은 고정되지 않거나 접지된 XYZ 방향을 정의하는 부품을 선택하지 않는 한 전체 좌표계의 해당 축에 각가속도 벡터를 투영합니다.
|
선택된 파트 원점은 흰색의 작은 구

로 나타납니다.
흰 배경을 사용하면 원점을 확인하기 어렵습니다.
-
플롯 결과 옵션을 선택하고
 을(를) 클릭합니다.
을(를) 클릭합니다.
결과가 MotionManager 디자인 트리에 나타납니다.
-
계산
 (MotionManager 도구 모음)을 클릭합니다.
(MotionManager 도구 모음)을 클릭합니다.